
About
Driven by curiosity and fueled by "What If" questions, I'm always exploring what's beneath the surface.

Robotics Researcher
I hold a B.Sc. and an M.Sc. from the Computer Engineering Department of Middle East Technical University (METU). I spent nearly 4 years studying robotics, computer vision, and human-robot interaction at Kovan and ROMER. Currently, I work at Rapsodo, a sports analysis company leveraging cutting-edge computer vision technology to revolutionize athletic performance.
- City: Ankara, Turkey
I'm driven by a deep curiosity to uncover the algorithms behind everything that piques my interest. My approach to understanding is hands-on—I love to touch, see, and share my discoveries with others. I’m constantly observing to find patterns and states, but I don’t stop there. If I can interact with something, I do. Whether it’s moving a robot or experimenting with its sensors, or riding a hoverboard (sorry, Romer colleagues!), I believe in diving in and learning through doing. This is why I spend most of my time playing, trying, and failing, as it’s the best way to learn.
This hands-on approach is one of the reasons I chose robotics. It gives me the opportunity to physically interact with systems, see them work, and show others the magic behind them. Computer vision is especially exciting for me because it lets robots "sense" the world, and I can visualize nearly every step of that process. It's like following the journey of an image from start to finish, and it fascinates me.
While robotics is my main focus, I also have a broad curiosity in other areas of computer science, like motion planning and collision avoidance, which I studied during my first internship. Computer graphics is another area that caught my attention during a course, and I had the chance to dive deep into it during my time at Rapsodo, where I worked on generating synthetic data for training. This experience further fueled my interest in the field, and I’d love to explore it even more.
When I’m not in the lab or the office, you’ll find me playing football, gaming, lifting weights, reading classics, or trying to learn electric guitar.
Interactive Application from MSc. Thesis: Formulating Social Cues for Cobots
Explore my interactive Three.js application, HRI4CobotJS, which showcases the development of two non-verbal computational HRI filters—gazing and breathing—designed to transform a UR5 robot arm into an interactive HRI research platform. These filters aim to enhance the perceived interaction quality of Cobots, as evaluated in a study with 57 participants through constructs like Social Presence and Anthropomorphism. Click "Enable Application" below to view it without overloading your system.
Snaps of Works
Some videos related to my works. Detailed versions will be at Protfolio section


References


Resume
For detailed CV please see:Education
M.Sc. Computer Science
2021 - 2024
Ankara, Türkiye
Middle East Technical University
CGPA: 3.93
B.Sc. Computer Science
2016 - 2021
Ankara, Türkiye
Middle East Technical University
CGPA: 3.37
Professional Experience
Computer Vision Engineer
2023 - present
Rapsodo
Ankara, Türkiye
Researcher
2021 - 2023
Center of Robotics and AI (ROMER)
Ankara, Türkiye
- I conducted a Human-Robot Interaction study with Assoc. Prof. Erol Şahin. Adding lifeness on a robot arm (UR5) with breath- ing and gazing animations was the aim of study. I run exper- iments with 57 persons to investigate the impact of our pro- posed animations on humans. The paper will be submitted to IEEE Robotics and Automation Letters (RAL).
- We contributed a chapter for the book "Human-Robot Collabo- ration: Unlocking the Potential for Industrial Applications". I mostly contributed to the Perception section. The book is unpublished yet.
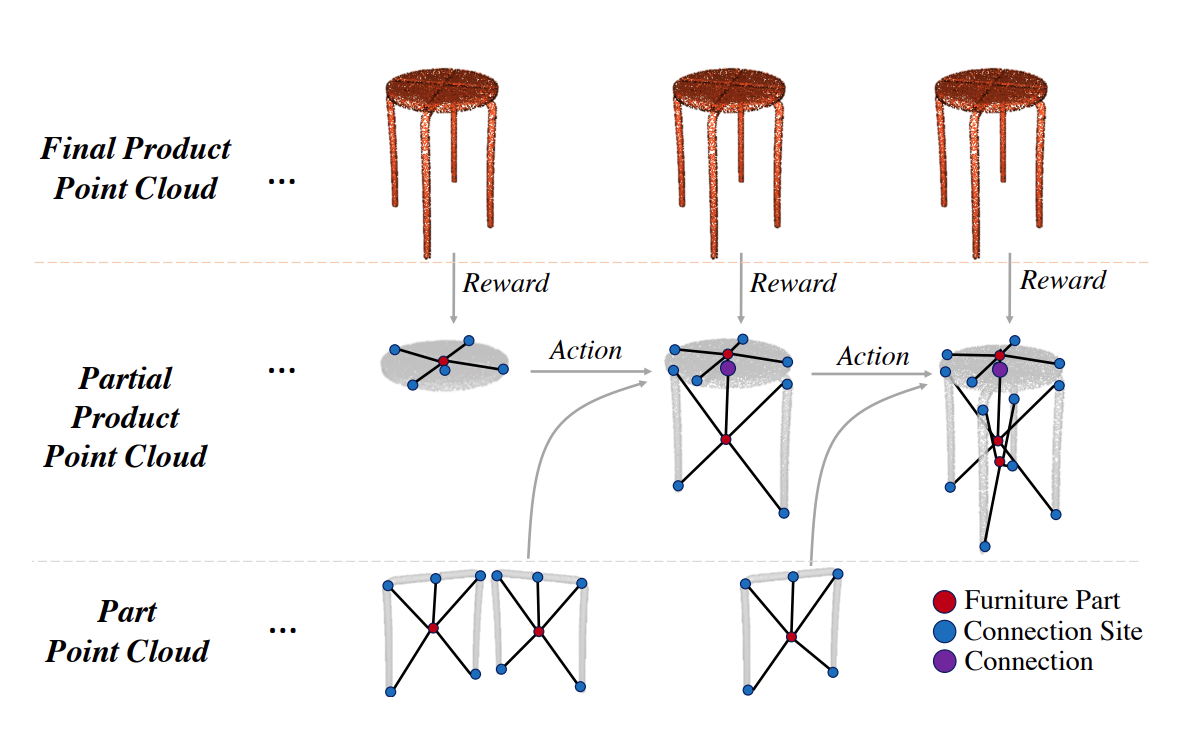
- We published an IROS paper. The study is learning furniture as- sembly by using point cloud, graph neural networks and rein- forcement learning.
Researcher Intern
2019 - 2021
Kovan Robotics Lab
Ankara, Türkiye
- Human-robot handover for UR5 arm.
- Experienced on ROS (The Robot Operating System), MoveIt, Gazebo Simulator and Rviz.
- Implemented path planning algorithms: A*, LPA*, RRT, RRT*, RRT#.
- mplemented collision avoidance algorithm: ORCA
Contact
Location:
Ankara / Turkey
Email:
burakbolatcs@gmail.com